Exam-Style Problems
⬅ Back to SubchapterNov 2013 p12 q4
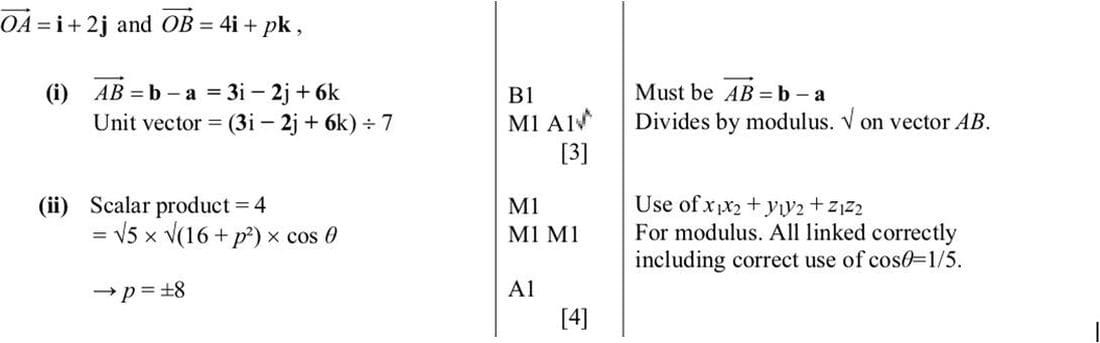
Relative to an origin O, the position vectors of points A and B are given by \(\overrightarrow{OA} = \mathbf{i} + 2\mathbf{j}\) and \(\overrightarrow{OB} = 4\mathbf{i} + p\mathbf{k}\).
(i) In the case where \(p = 6\), find the unit vector in the direction of \(\overrightarrow{AB}\).
(ii) Find the values of \(p\) for which angle \(AOB = \cos^{-1}\left(\frac{1}{5}\right)\).
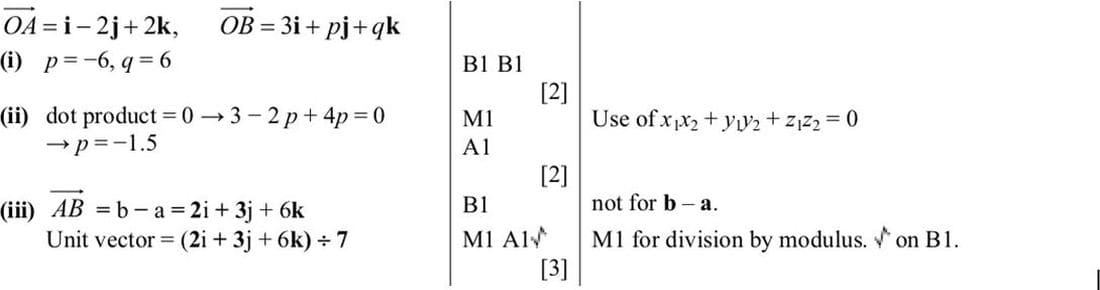
June 2013 p12 q6
Relative to an origin O, the position vectors of points A and B are given by
\(\overrightarrow{OA} = \mathbf{i} - 2\mathbf{j} + 2\mathbf{k}\) and \(\overrightarrow{OB} = 3\mathbf{i} + p\mathbf{j} + q\mathbf{k}\),
where \(p\) and \(q\) are constants.
- State the values of \(p\) and \(q\) for which \(\overrightarrow{OA}\) is parallel to \(\overrightarrow{OB}\).
- In the case where \(q = 2p\), find the value of \(p\) for which angle \(BOA\) is \(90^\circ\).
- In the case where \(p = 1\) and \(q = 8\), find the unit vector in the direction of \(\overrightarrow{AB}\).
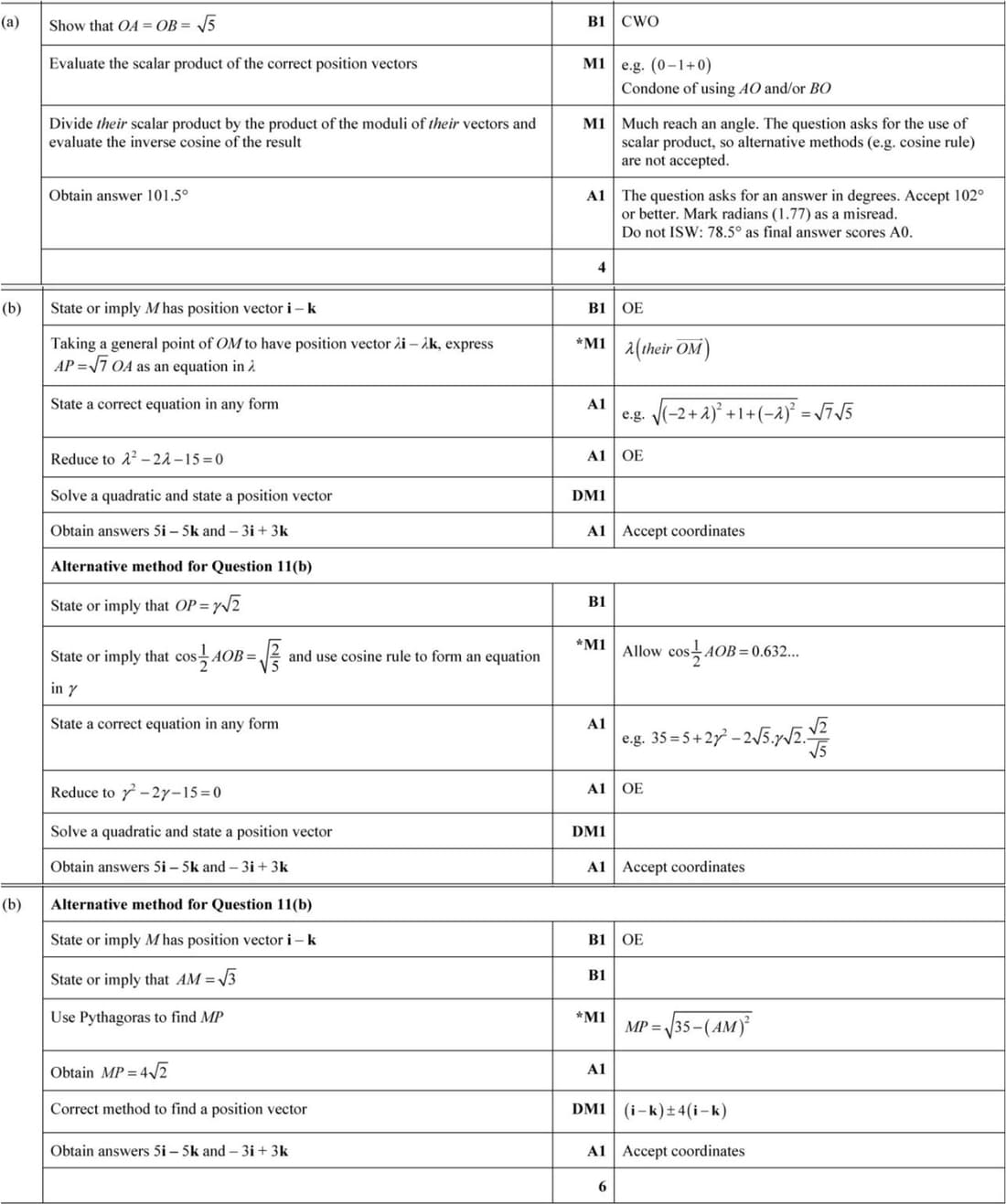
June 2021 p32 q11
With respect to the origin O, the points A and B have position vectors given by \(\overrightarrow{OA} = 2\mathbf{i} - \mathbf{j}\) and \(\overrightarrow{OB} = \mathbf{j} - 2\mathbf{k}\).
(a) Show that \(OA = OB\) and use a scalar product to calculate angle \(AOB\) in degrees.
The midpoint of \(AB\) is \(M\). The point \(P\) on the line through \(O\) and \(M\) is such that \(PA : OA = \sqrt{7} : 1\).
(b) Find the possible position vectors of \(P\).
June 2013 p11 q6
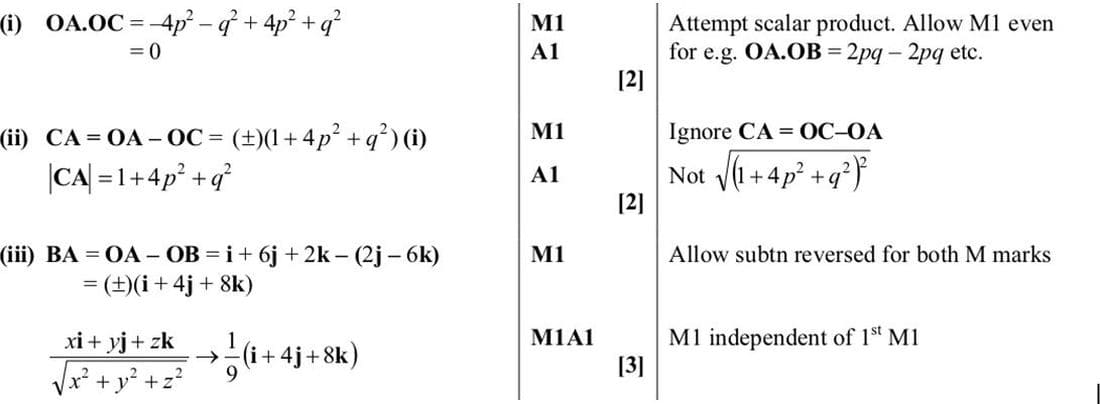
Relative to an origin O, the position vectors of three points, A, B and C, are given by
\(\overrightarrow{OA} = \mathbf{i} + 2p\mathbf{j} + q\mathbf{k}, \quad \overrightarrow{OB} = q\mathbf{j} - 2p\mathbf{k} \quad \text{and} \quad \overrightarrow{OC} = -(4p^2 + q^2)\mathbf{i} + 2p\mathbf{j} + q\mathbf{k},\)
where \(p\) and \(q\) are constants.
- Show that \(\overrightarrow{OA}\) is perpendicular to \(\overrightarrow{OC}\) for all non-zero values of \(p\) and \(q\).
- Find the magnitude of \(\overrightarrow{CA}\) in terms of \(p\) and \(q\).
- For the case where \(p = 3\) and \(q = 2\), find the unit vector parallel to \(\overrightarrow{BA}\).
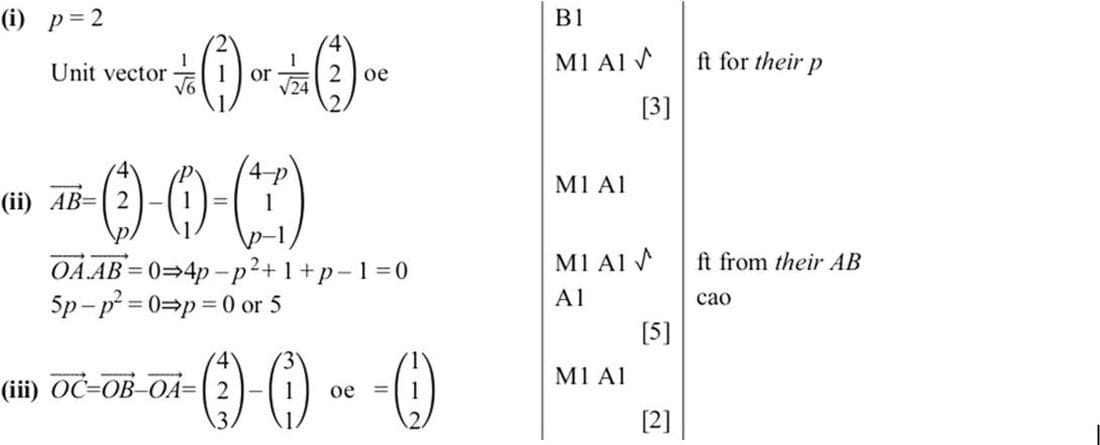
Nov 2012 p13 q9
The position vectors of points A and B relative to an origin O are given by
\(\overrightarrow{OA} = \begin{pmatrix} p \\ 1 \\ 1 \end{pmatrix}\) and \(\overrightarrow{OB} = \begin{pmatrix} 4 \\ 2 \\ p \end{pmatrix}\),
where \(p\) is a constant.
- In the case where OAB is a straight line, state the value of \(p\) and find the unit vector in the direction of \(\overrightarrow{OA}\). [3]
- In the case where OA is perpendicular to AB, find the possible values of \(p\). [5]
- In the case where \(p = 3\), the point C is such that OABC is a parallelogram. Find the position vector of C. [2]